本文共 2421 字,大约阅读时间需要 8 分钟。
基于视觉的三维重建,指的是通过摄像机获取场景物体的数据图像,并对此图像进行分析处理,再结合计算机视觉知识推导出现实环境中物体的三维信息。
1. 相关概念
(1)彩色图像与深度图像
彩色图像也叫作RGB图像,R、G、B三个分量对应于红、绿、蓝三个通道的颜色,它们的叠加组成了图像像素的不同灰度级。RGB颜色空间是构成多彩现实世界的基础。深度图像又被称为距离图像,与灰度图像中像素点存储亮度值不同,其像素点存储的是该点到相机的距离,即深度值。图2-1表示深度图像与灰度图像之间的关系。
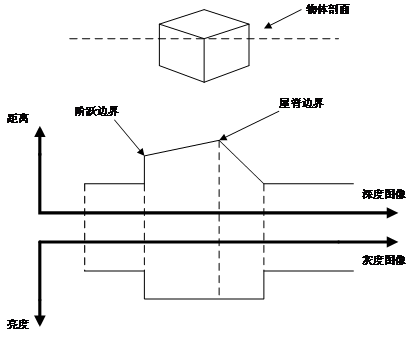
深度值指的目标物体与测量器材之间的距离。由于深度值的大小只与距离有关,而与环境、光线、方向等因素无关,所以深度图像能够真实准确的体现景物的几何深度信息。通过建立物体的空间模型,能够为深层次的计算机视觉应用提供更坚实的基础。
(2)PCL
PCL(Point Cloud Library,点云库)是由斯坦福大学的Dr.Radu等学者基于ROS(Robot Operating System,机器人操作系统)下开发与维护的开源项目,最初被用来辅助机器人传感、认知和驱动等领域的开发。2011年PCL正式向公众开放。随着对三维点云算法的加入与扩充,PCL逐步发展为免费、开源、大规模、跨平台的C++编程库。
PCL框架包括很多先进的算法和典型的数据结构,如滤波、分割、配准、识别、追踪、可视化、模型拟合、表面重建等诸多功能。能够在各种操作系统和大部分嵌入式系统上运行,具有较强的软件可移植性。鉴于PCL的应用范围非常广,专家学者们对点云库的更新维护也非常及时。PCL的发展时至今日,已经来到了1.7.0版本。相较于早期的版本,加入了更多新鲜、实用、有趣的功能,为点云数据的利用提供了模块化、标准化的解决方案。再通过诸如图形处理器、共享存储并行编程、统一计算设备架构等领先的高性能技术,提升PCL相关进程的速率,实现实时性的应用开发。
在算法方面,PCL是一套包括数据滤波、点云配准、表面生成、图像分割和定位搜索等一系列处理点云数据的算法。基于不同类型区分每一套算法,以此把整合所有三维重建流水线功能,保证每套算法的紧凑性、可重用性与可执行性。例如PCL中实现管道运算的接口流程:
①创建处理对象,例如滤波、特征估计、图像分割等;
②通过setInputCloud输入初始点云数据,进入处理模块; ③设置算法相关参数; ④调用不同功能的函数实现运算,并输出结果。为了实现模块化的应用与开发,PCL被细分成多组独立的代码集合。因此便可方便快捷的应用于嵌入式系统中,实现可移植的单独编译。如下列举了部分常用的算法模块:
libpcl I/O:完成数据的输入、输出过程,如点云数据的读写;
libpcl filters:完成数据采样、特征提取、参数拟合等过程; libpcl register:完成深度图像的配准过程,例如迭代最近点算法; libpcl surface:完成三维模型的表面生成过程,包括三角网格化、表面平滑等。此类常用的算法模块均具有回归测试功能,以确保使用过程中没有引进错误。测试一般由专门的机构负责编写用例库。检测到回归错误时,会立即将消息反馈给相应的作者。因此能提升PCL和整个系统的安全稳定性。
(3)点云数据
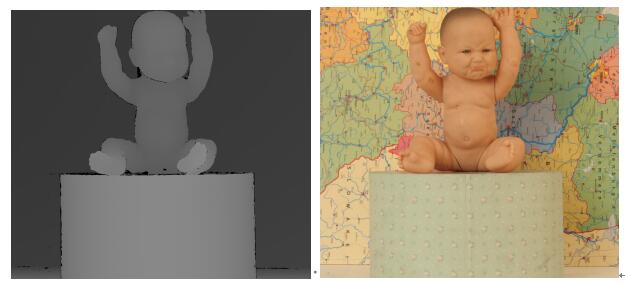
如图2-3所示,展示了典型的点云数据(Point Cloud Data,PCD)模型。

点云数据通常出现在逆向工程中,是由测距设备获取的物体表面的信息集合。其扫描资料以点的形式进行记录,这些点既可以是三维坐标,也可以是颜色或者光照强度等信息。通常所使用的点云数据一般包括点坐标精度、空间分辨率和表面法向量等内容。点云一般以PCD格式进行保存,这种格式的点云数据可操作性较强,同时能够提高点云配准融合的速度。本文研究的点云数据为非结构化的散乱点云,属于三维重建特有的点云特点。
(4)坐标系
在三维空间中,所有的点必须以坐标的形式来表示,并且可以在不同的坐标系之间进行转换。首先介绍基本坐标系的概念、计算及相互关系。①图像坐标系
图像坐标系分为像素和物理两个坐标系种类。数字图像的信息以矩阵形式存储,即一副像素的图像数据存储在维矩阵中。图像像素坐标系以为原点、以像素为基本单位,U、V分别为水平、垂直方向轴。图像物理坐标系以摄像机光轴与图像平面的交点作为原点、以米或毫米为基本单位,其X、Y轴分别与U、V轴平行。图2-4展示的是两种坐标系之间的位置关系:
令U-V坐标系下的坐标点(u0,v0),与代表像素点在X轴与Y轴上的物理尺寸。那么图像中的所有像素点在U-V坐标系与在X-Y坐标系下的坐标间有着如式(2-1)表示的关系:
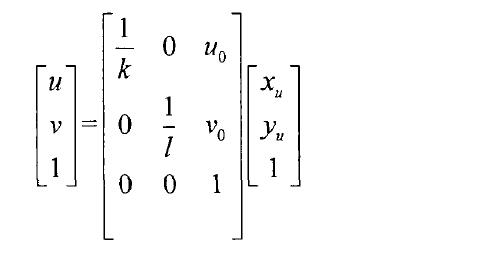
其中指的是图像坐标系的坐标轴倾斜相交而形成的倾斜因子(Skew Factor)。
②摄像机坐标系
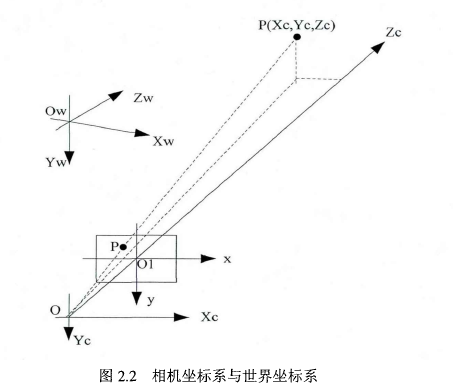
摄像机坐标系由摄像机的光心及三条、、轴所构成。它的、轴对应平行于图像物理坐标系中的、轴,轴为摄像机的光轴,并与由原点、、轴所组成的平面垂直。如图2-5所示: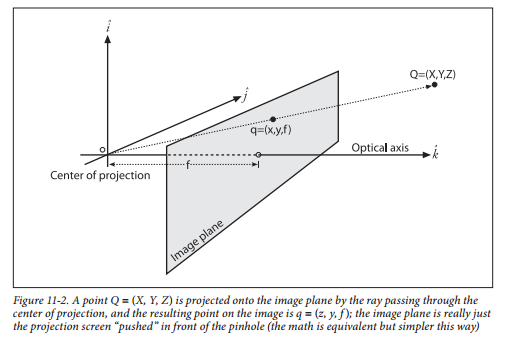
令摄像机的焦距是f,则图像物理坐标系中的点与摄像机坐标系中的点的关系为:
③世界坐标系
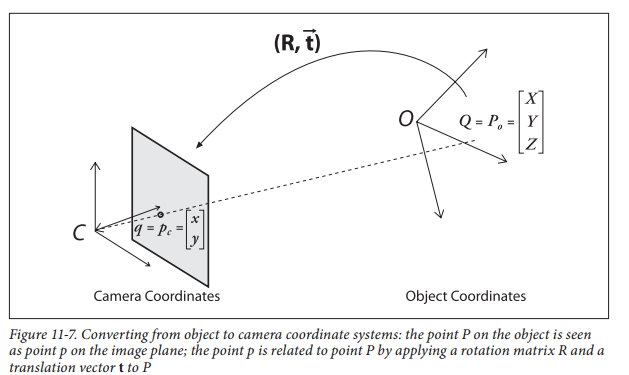
考虑到摄像机位置具有不确定性,因此有必要采用世界坐标系来统一摄像机和物体的坐标关系。世界坐标系由原点及、、三条轴组成。世界坐标与摄像机坐标间有着(2-3)所表达的转换关系:
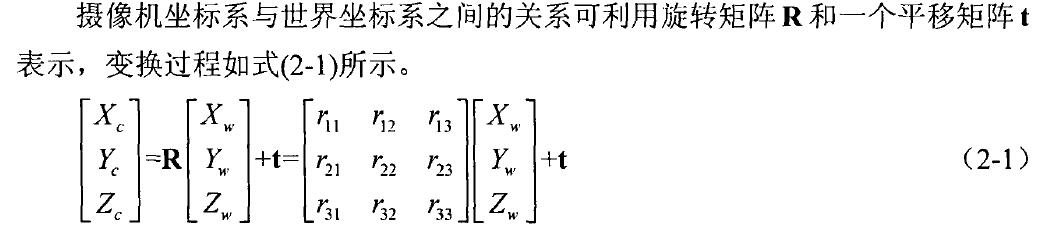
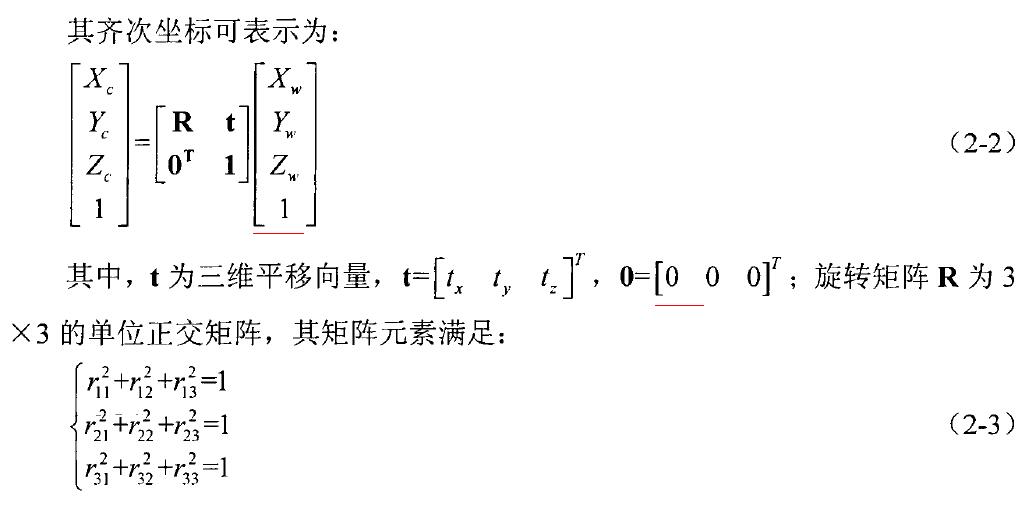
( 2